人形机器人自由及行走负重状态的高效自动测量(API测量服务解决方案)

随着机器人技术的进步和发展,人形机器人已经广泛进入到生产和生活的各个领域。人形机器人可实现仿生自由行走,动力关节组合模仿人类的肌肉骨骼系统,并提供更大的自由度,甚至可以实现更高级的步态、完成各种复杂的动作和任务。
人形机器人研发过程中,需要对其运动过程,即自由状态和负载状态下机器人自身结构变化进行监测分析,优化产品结构,提高运行中的稳定性。其中,CoG(重心地面投影点)、ZMP(零力矩点)和CoP(压力中心)是评价双足步行机构行走稳定性的重要参数,通过记录参数的变化,通过分析,来改善和提升机器人性能。
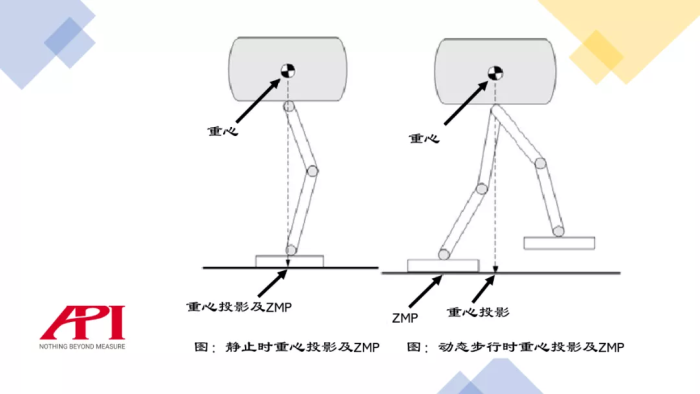
图为:人形机器人静止及动态行进时的重心投影与ZMP示意
传统测量方法
传统测量方法,采用安装在脚部的六维力/力矩传感器检测出地面反力信息,计算得到CoP,通过独特的姿态控制同时调整躯干姿态和脚部姿态,进而保持ZMP和CoP在行走过程中始终处于合适的位置,实现稳定行走。但由于机器人自身重量原因、或由于处在负载状态下,其双足自身结构发生的变化尚未考虑进去,导致所测数据失真,进而影响整体试验效果。

图为:API Radian Pro激光跟踪仪
API测量服务解决方案
测量时,在Radian Pro激光跟踪仪安置完毕后,将各靶标球(靶球,SMR)固定在机器人测量节点,通过使用Radian的Teach-to-Drive功能,会迅速自动测量并记录下各测量点的空间3维坐标;通过若干个空间点,即可在软件中构建相应的线、面、体,从而精准分析各个标的之间的包括平行度、平面度、垂直度、直线度、角度分度等等诸多种类的位置关系,由此计算出各关节相对于机器人各姿态下的六维参数和CoG,并将测量结果实时反馈。
在整个测量过程中,需要多次交替测量机器人自由状态及负载状态时的数据参数,并比较两种状态下机器人腿部机械支撑结构的变形。由于机器人本身自重较大(大于150公斤),双足交替行进的这一过程中,会有不稳的状态出现,若采取通常的测量方式,每次采集数据时都需触碰机器人本身,就额外造成了机器人的位置变化,造成测量数据的不精准。
而使用Radian Pro激光跟踪仪的测量方案的亮点正在于:测量过程中,无需人为干预,自动测量、自动分析并反馈结果。

图为:RadianPro激光跟踪仪iVision功能展示
Radian Pro激光跟踪仪内置有iVision智能摄像头,具备多靶球自动识别、和快速排序编程的能力。测量时,在机器人上设置多个监测点,使用Teach-to-Drive功能自动编号识别并完成测量。随后,根据要求进行快速数据比对分析。iVision智能相机具备大视场角识别范围,可以在实验室狭小的空间范围内精准识别布置于机器人上的各监测点,快速自动完成测量。即使机器人进行较大范围移动,基于iVision的大范围识别能力,只要跟踪仪相机识别到之前测量的监控点中的其中三个点,就可以自动拟合定位预知其它待测点的相对位置,完成测量并对测量点进行排序,随即通过软件完成建立坐标和分析计算。
由于机器人腿部机械结构复杂,测量中,采用0.5英寸小靶球作为测量点。其中选取机械结构稳定的部位布置3个靶球,(该部位为整块刚性结构件,在各种状态下都不会变形),利用这三个点建立坐标系,采集其余点在该坐标系下的坐标值。然后变更机器人的状态,进行测量,同样利用之前的三个点建立坐标系,得到其它点在该坐标系下的值,并与之前的数据进行比较。测量过程全部为自动完成,无需人为干预。
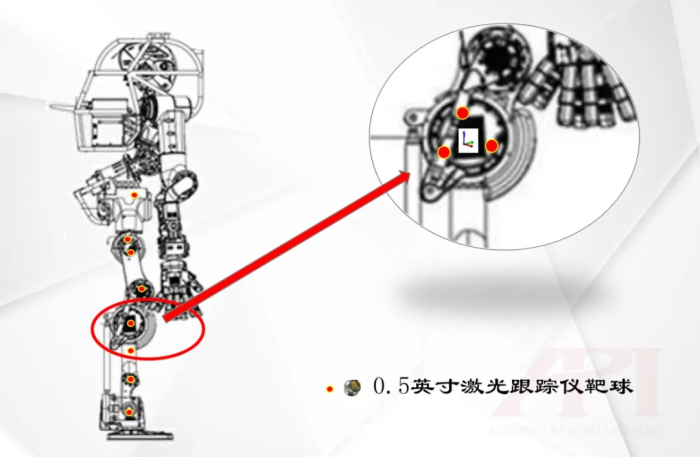
图为:测量点布置示意
结 论
API测量服务为双足式移动机器人提供了便捷、高效的动态测量及实时调整指导解决方案,为客户大幅缩短了移动机器人自由状态和负载状态下的测试时间,争取了更多的宝贵的生产时间,有效控制了成本,并为机器人性能的提升和完善提供了强有力的保障。
API公司在全球各主要国家和地区设立有分公司或办事机构,并组建有高素质的服务工程师队伍,可及时、就近为您提供基于激光跟踪仪、激光干涉仪、关节臂的精密测量服务,并出具专业的测量报告;为您节省购买设备及人员培训的开支和时间成本;专业高效、快速现场评估,为您降低项目风险。
热点文章
-

长征十号乙一子级回收圆满成功!火箭量产制造装备迎来确定性产业红利
2026-07-10
-

订单多点开花!拓璞成套装备全面赋能,开启大直径火箭批量生产新时代
2026-07-13
-

【雷尼绍】工业之眼(一) | 精准位置反馈为什么是运动控制的基石?
2026-07-15
-

-

IMAO今尾【产品介绍】机器人用夹具:可运用于自动化设备的机械式夹具
2026-07-13
-

聚力共赢・深耕智造 | 易格斯与大前机床签署战略合作协议,五年携手从产品配套迈向价值共创
2026-07-15
-

精雕科技与见真机械签署战略合作协议
2026-07-16








评论
加载更多