六轴工业机器人在金属加工行业的应用
KADIA Produktion GmbH + Co公司,位于纽廷根,多年来一直致力于设计基于6轴工业机器人的去毛刺机器人单元。同时,显现出了新的趋势:具备更高附加值元件的解决方案,即含有常规加工工艺,如铣削、钻孔或螺纹切割。因此,机器人不再只是去毛刺机的一部分。
该公司通过其 "去毛刺机器人单元 "实现两种加工方案:机器人抓取工件并将其移动到固定的工具(通常是刷子)上,或者对刀具进行导向,如铣刀。后一种情况的要求更高,例如大型齿轮的去毛刺(图1)。单纯去毛刺工艺对于此类加工已不太合适;它更像是一个边缘切削的工艺。齿轮的倒角可达5毫米。用于此类加工的刀具为整体硬质合金立铣刀。其编程非常复杂,因为刀具切削需要沿着复杂的齿形侧面进行。
图1:齿轮加工
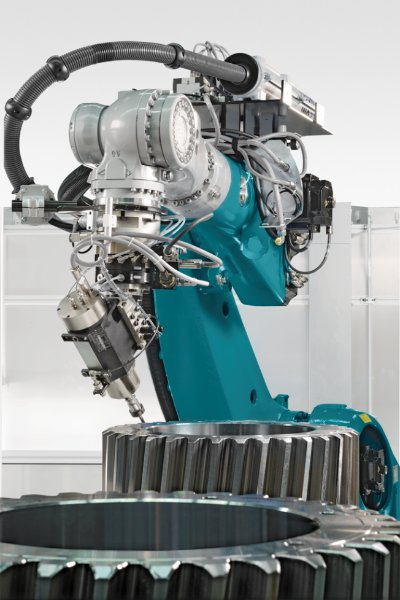
说明: 不仅仅是去毛刺——大型齿轮的加工工艺。机器人使用整体硬质合金刀具,完成齿部高达5毫米的倒角,刀具精确地沿着齿面轮廓移动。图片:KADIA
近年来,"去毛刺自动化单元"进一步发展,其中,机器人除了去毛刺外,还具备了更广泛的功能。例如,在此类组合中,机器人与加工中心协同工作,即机器人上料工件,然后下料工件,如有必要,还可兼具相邻工位的中转传输,如质检站或清洗站,去毛刺只是其若干任务中的一项。
除了这些任务,还伴随有其他的任务需求。出于这个原因,KADIA现已在其应用开发中加入了第三类机器人系统:"加工机器人单元"。"越来越多的客户询问机器人是否可以加工例如螺纹面或平面",KADIA公司去毛刺机销售部的Jannik Weiss解释说。客户的计划:他们希望避免再次装夹操作。如果去毛刺机器人(通常为机械加工后的后续工艺)能够接替其他机床的加工工作,就能节省大量的时间。"因此,我们正在对公司进行重新定位",KADIA公司总经理Henning Klein解释说,"由于我们在机器人自动化解决方案以及去毛刺机器人单元方面已经积累了丰富的经验,因此转型为机器人辅助机械加工的工艺对我们来说并不是难事。"
高性价比加工解决方案
原则上,6轴工业机器人适用于各种加工技术:钻孔、铣削、螺纹切削等,干式或湿式或使用微量润滑,一切皆有可能。其主要优点在于,机器人是一个相对低成本的加工解决方案。有了它,可以轻松地触及立体工件的所有暴露面。如果使用加工中心实现同样加工数量的自由度,则需要更复杂的5轴机床方案,这将导致成本居高不下。此外,机器人可以交替抓取夹爪和刀具,因此适用于多功能场景。
机械加工机器人的局限性在于其相对较低的刚性,它不能提供加工中心上精密导向的可重复性。机械臂伸得越远,就越不精确。因此,它适用于具有相对较大公差和较小切削深度的加工要求。当然,部分的调整或参数设置也会对加工效果产生影响。
编程可以在一定范围内补偿理想路径在反转点的偏差。"KADIA的工艺开发部门决定哪些参数需要优化以及如何优化。我们为此花费了大量的时间,以便最终为客户提供工艺保证",Jannik Weiss强调说。
示例:铣削汽车电池外壳托盘
机器人最适合加工用于汽车电池铝制外壳托盘的表面。这些外壳由带有防撞结构的挤压型材制成,实际上是油箱的替代品。其需求量正在迅速增加。由于表面加工精度和公差要求,加工中心的加工会超差。另一方面,机器人可以满足尺寸精度要求,并充分发挥其成本优势和灵活性。
KADIA最近为一家汽车制造商开发了相应的加工方案。任务具体内容包括:铣削分型面,随后用毛刷去毛刺,以便可以用螺栓固定框架,并用钢盖板密封(图2)。客户要求的一个重要细节是铣出的表面要平整,波纹度要小。客户规定的表面精度为Rz < 20 µm / Ra < 4 µm。
图2: 工件

说明: 由铝型材制成用于固定汽车电池的托盘结构。机器人的任务:在连续表面上进行铣削,以便随后安装盖板。图片:KADIA
解决方案:一个单元含三个机器人(图3)。为了满足节拍要求,工件的一侧需要两个机器人——该侧加工量较大,而另一侧设置一个机器人。加工设置时间不到80秒即可完成,即包括铣削及去毛刺。如果将来需要加工具有更多细节的工件类型,该单元可配备第四个机器人。
图3:用于电池托盘的机器人单元

说明: 由KADIA设计的带有三个 6 轴工业机器人的单元,用于加工电动汽车的电池外壳托盘。图片:KADIA
事先使用铣削工具进行的测试(图4)表明,在设置机器人加工参数时,振动最小化是一个主要问题。例如,切削几何形状、宏观和微观几何形状是重要的调整手段,因为它们对切削力具有决定性的影响。在其他方面,切削深度是一个关键标准;应用工程师将其限制在2 mm内 以减少振动。同时,他们优化了切削速度和齿进给量,以避免出现颤动痕迹(图5)。在加工过程中,切削刃通过最小量的润滑来冷却。可调式主轴单元安装于机器人臂上,可分析切削数据,其构成第七轴。该解决方案可实现的表面精度为Rz = 10 µm / Ra = 2 µm。因此,用户要求的表面精度增加了2倍。
图4:测试带有模拟缸盖的工件
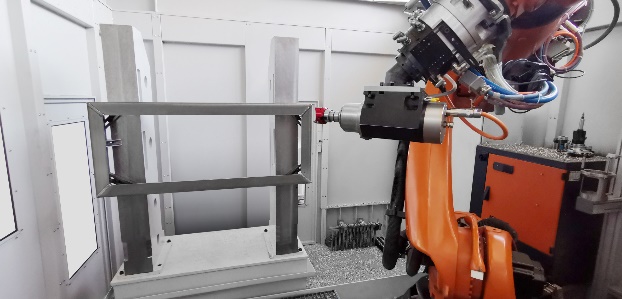
说明:KADIA事先对含有模拟缸盖的工件进行了大量测试,以确定最佳的加工参数。图片:KADIA
图5:表面
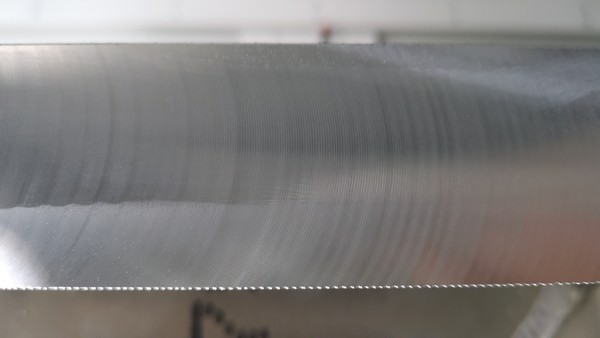
说明:在切削速度、进给率和切削深度的最佳组合下,机器人加工后的表面精度比要求的更佳。同时避免振动波纹。图片:KADIA
操作简单
乍一看,一个包含三个机器人的单元是一个复杂的系统。但是,它的操作比预期的要简单。KADIA公司对单元进行了设计,因此操作者不需要成为一个数控编程员或机器人专家。Weiss继续说道:"任何了解技术图纸的熟练金属工人都能够操作我们的机器人单元。操作员唯一需要掌握的是定义每一个加工细节。该操作简单,易校正。我们预先定义了方法通道及转换到下一步的操作。操作员可以在图纸文本中简单快速读每一个和工艺相关的尺寸信息"。因此,如果一个工件超出了公差,操作员可以快速、轻松地自行校正相应的工件和刀具坐标。
文章及图片来源:KADIA 转载平台:客户投稿
责任编辑:朱晓裔 审核人:李峥
热点文章
-

长征十号乙一子级回收圆满成功!火箭量产制造装备迎来确定性产业红利
2026-07-10
-

订单多点开花!拓璞成套装备全面赋能,开启大直径火箭批量生产新时代
2026-07-13
-

【雷尼绍】工业之眼(一) | 精准位置反馈为什么是运动控制的基石?
2026-07-15
-

-

IMAO今尾【产品介绍】机器人用夹具:可运用于自动化设备的机械式夹具
2026-07-13
-

聚力共赢・深耕智造 | 易格斯与大前机床签署战略合作协议,五年携手从产品配套迈向价值共创
2026-07-15
-

精雕科技与见真机械签署战略合作协议
2026-07-16








评论
加载更多