机器人打磨技术要点及应用实例(上)
前言
打磨抛光,是机械制造业、加工业、模具业等众多行业中的重要工序之一。而机器人在这一制造工序中,有着极为广阔的应用。近年来国内打磨机器人安装量呈现快速增长态势。本文将从以下六个方面介绍机器人打磨的技术要点及应用实例。
1、打磨工艺简介
打磨工艺包含磨削,抛光,去毛刺等多种工艺。磨削是指对工件的表面进行精加工,使其在精度和表面粗糙度等方面达到设计要求的工艺过程,按磨削精度分粗磨、半精磨、精磨、镜面磨削、超精加工。抛光是指利用机械、化学或电化学的作用,使工件表面粗糙度降低,以获得光亮、平整表面的加工方法。去毛刺是清除工件已加工部位周围所形成的刺状物或飞边。

打磨工艺主要用于工件的表面打磨、棱角去毛刺、焊缝打磨、内腔内孔去毛刺、孔口螺纹口加工等工作。
· 主要应用行业
· 卫浴五金行业
· 3C行业
· 家电零部件行业
· 木材建材家居制造行业
· 汽车制造
2、机器人VS人工打磨
人工打磨的缺点
· 打磨产生的火花、粉尘及噪音严重影响人的身心健康;
· 工人无法长时间集中精力从事紧张、重复的劳动,容易发生工伤事故;
· 人工打磨质量要依照工人经验去判断好坏,使得打磨质量无法得到保证;
· 熟练工的缺失,工效低下且招工困难;
· 人工成本不断抬高,而且恶劣的工作环境必须为工人支付更高的薪酬。
机器人打磨的优点
· 密闭式的机器人工作站,将高噪音和粉尘与外部隔离,减少环境污染;
· 操作工不直接接触危险的加工设备,避免工伤事故的发生;
· 机器人能保持产品加工精度的一致性,不仅保证了质量的可靠,而且降低了废品率;
· 机器人替代熟练工,不但降低人力成本,而且也不会因为操作工的流失而影响交货期;
· 机器人可24小时连续作业,生产效率大福提高。
· 可再开发性,用户可根据不同样件进行二次编程,缩短产品改型换代的周期,减少相应的投资设备;
3、打磨机器人的分类
打磨机器人通常分为工具型和工件型打磨机器人两类。
1.工具型打磨机器人
工具型打磨机器人是机器人通过操纵末端执行器固连打磨工具,完成对工件的打磨加工。
首先需要根据应用选择适合的机器人,参考因素:
· 机器人的行程范围
· 机器人的有效负载
· 是否需要使用机器人力控功能
然后,针对不同的工艺,如打磨,抛光,去毛刺,拉丝等,选择合适的打磨工具端,参考因素:
· 对应的加工工艺粗、细、精
· 打磨工件的尺寸大小
· 是否需要吸尘
· 是否UR+产品
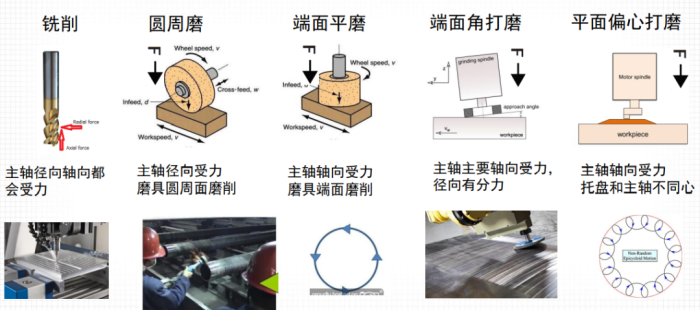
以下为5种传统打磨工具及其受力分析:
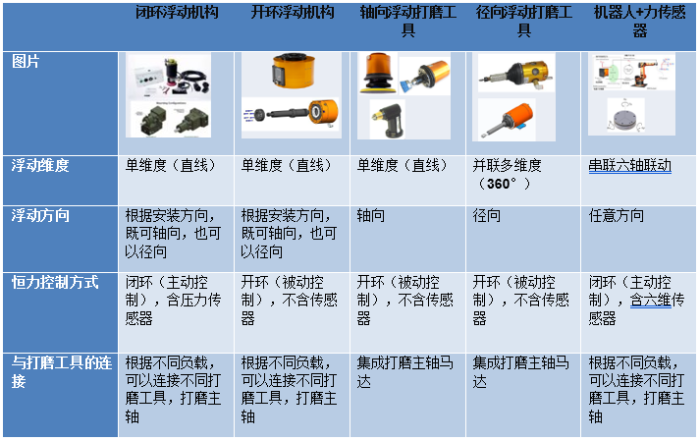
根据五种传统打磨方式,将机器人的高柔性、高自动化等优点融入打磨领域,研发出浮动打磨工具,即柔性打磨。以下为5种浮动打磨工具:
2.工件型打磨机器人
工件型打磨机器人是指通过机器人抓手夹持工件,把工件分别送达到各种位置固定的打磨机床设备,完成磨削、抛光等不同工艺和各种工序的打磨加工。
使用工件型打磨机器人首先需要选择打磨设备:
· 按打磨工艺要求,分别配置砂带机、毛刷机、砂轮机、抛光机等。
· 按精度要求,分别配置粗加工、半精加工、高精加工等各种工艺的打磨设备
工件型打磨机器人的力控技术
工件型打磨机器人,可根据打磨需要配置力控制器,通过力传感器,及时反馈机器人在打磨过程中工件与打磨设备的附着力,以及打磨程度,防止机器人过载,或工件打磨适度,从而确保工件打磨的一致性,防止产生废品。
4、机器人打磨技术要点
1.UR机器人的力控应用和特征选取
通过在机器人跟随路径时启用顺应性和沿可选轴(一个或多个)的力,“力”命令提供了一种简便的方法来对力敏感的应用进行编程。机器人会自动调整其位置以获得所需的力。
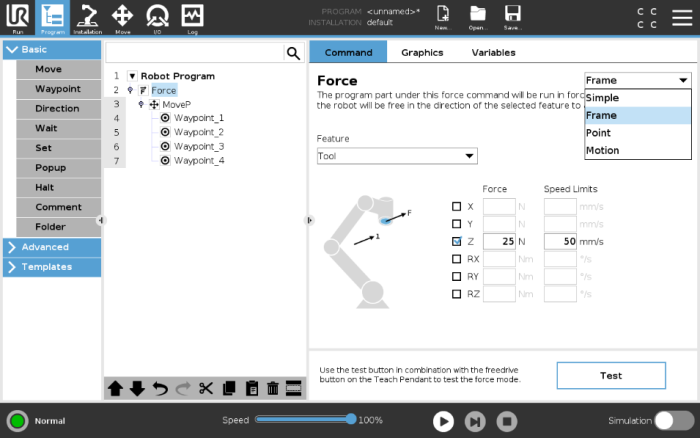
优傲机器人有以下几种类型的力控模式:
简单应用
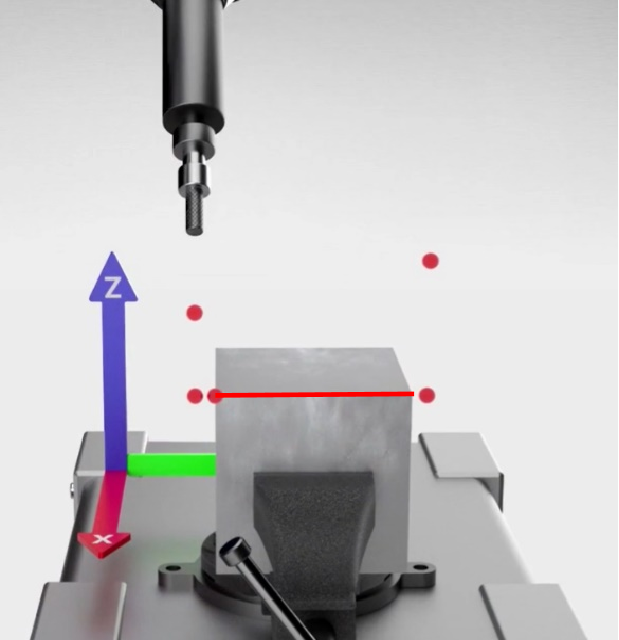
打磨图中工件上表面
· 确保机器人和工件水平
· 使用力简单模式,选取基座特征,设置合理的力大小
· 编辑简单力控的打磨程序

框架应用
打磨图中红色边缘
· 沿着工件方向建立平面特征
· 使用力框架选中X和Z并设置合理的速度
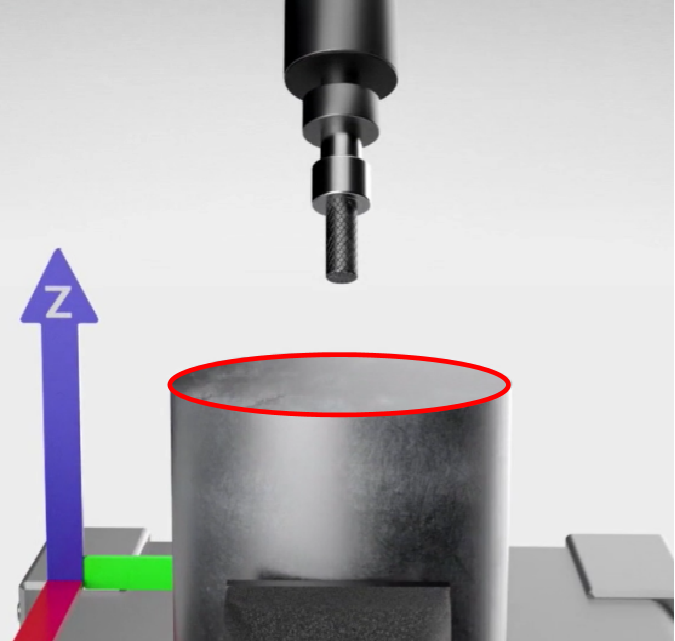
点特征应用
打磨图中红色圆外圈
· 在圆内部建立点特征
· 使用力控模式点,向Y方向设置合理的力和速度
2.RemoteTcp在打磨中的使用
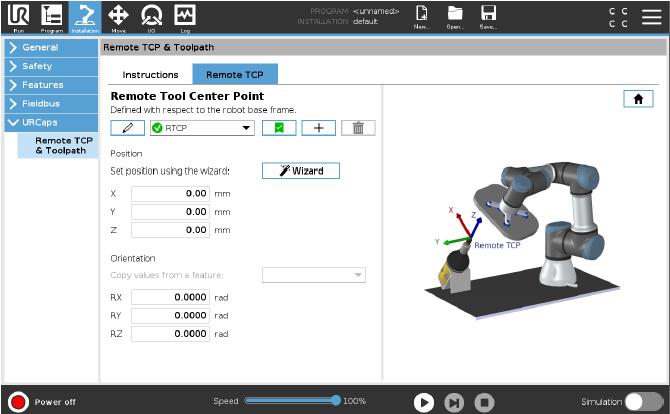
“远程工具中心点移动”命令用于相对于固定工具以恒定速度移动零件。在去毛刺,抛光等许多过程应用中,通常更容易用机器人拾起零件并将其以恒定速度围绕固定工具移动,例如砂带,去毛刺工具,抛光轮等。没有RTCP功能,特别是在零件边缘的圆弧周围编程时,是非常困难的:可以使用非常小的步长和一些微调来完成,但是这可能导致成千上万行的编程。远程TCP URCap是免费的,但需要在程序中使用之前激活,这可以通过注册机器人并获取许可证文件来获得。
如何使用RemoteTcp:
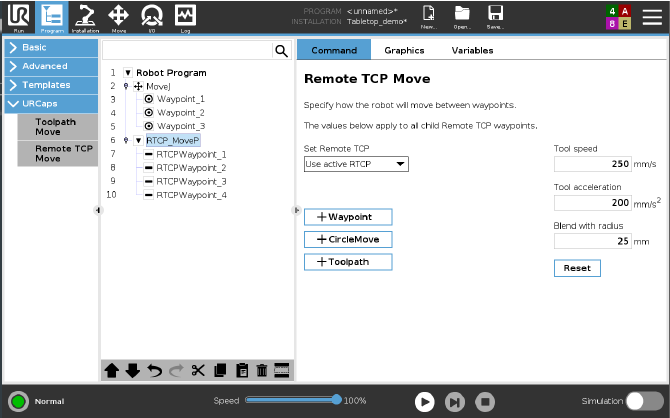
使用向导定义接触点
参考RemoteTcp详细指导:https://www.universal-robots.com/articles/ur/application-installation/remote-tcp-toolpath-urcap-instructional-videos/
3.外部轨迹导入、 G-CODE或仿真功能
特点
· e系列机器人可以匀速跟随复杂的刀具轨迹
· 使用标准CAD/CAM包生成G-Code工具路径文件
• SolidWorks
• Autodesk Fusion 360
• PTC Creo
• PTC Onshape, and more
· 通过u盘将G-Code工具路径文件加载到UR示教器
· 利用z轴自旋优化机器人运动
· 自动确定最优关节构型,避免奇点
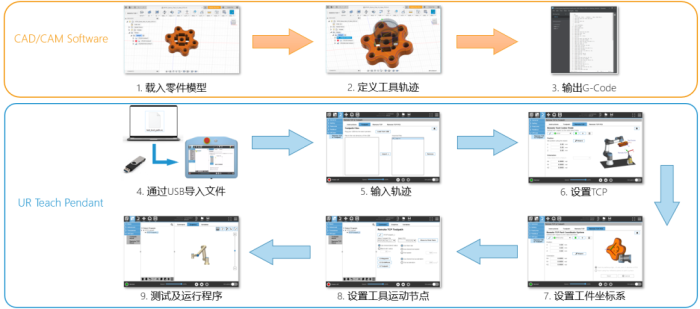
导入G-Code工具路径的好处
· 大大减少了机器人编程时间
· 对于复杂路径,程序只需要两个节点
· 根据工件CAD模型准确生成路径,不管复杂性
· 保持一个固定的工具速度沿着规划的路径运动
· 在与CNC相同的CAD/CAM软件中为6轴联动机器人编程加工站
· 不需要专门的离线机器人就能定义复杂的轨迹码编程
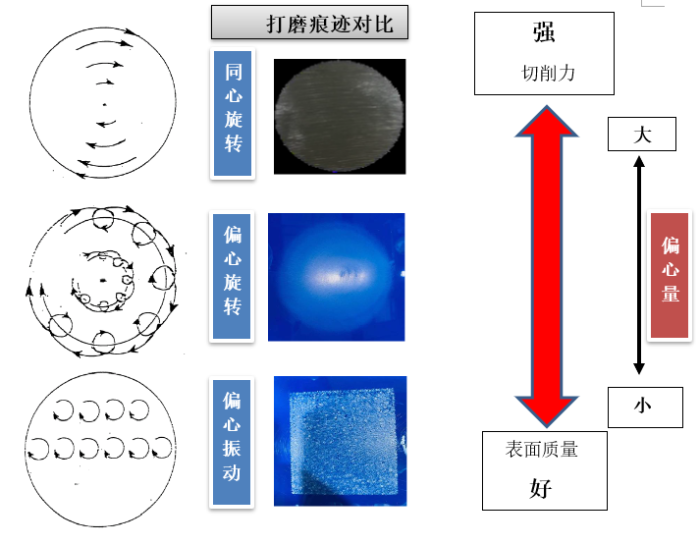
4.打磨工具的震动方式选择
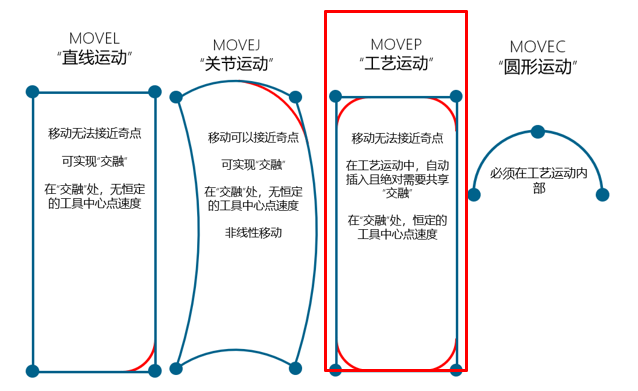
5.机器人移动方式
在打磨去毛刺等应用中,保证TCP速度的恒定,可以更好地保障工件表面处理的质量。
6.防护措施
对于打磨抛光等应用来说,作业工况恶劣,机器人防护等级要求高,一般要求达到防护等级为IP65。而优傲机器人的本地防护等级为IP54,所以针对这种情况,需要添加外部防护服。
下面推荐几个UR+防护服,目的是为机器人特别量身定制的防护套,在为机器人提供防护的同时又不影响其动作灵活性。

Robosuit® 是为全系列UR机械臂提供的全方位防护套。每个防护套都能满足您特定的应用和需求,防止极端温度、尖锐金属削屑、切削液和冷却剂以及颗粒(沙砾、灰尘和碎片)损坏优傲机器人。
覆盖范围可扩展至EOAT、夹爪、控制器,甚至还能提供示教器保护。

ROBO GEAR机器人防护套可以防止机器人沾上油漆,减少清洁需要,并降低机器人受污染的风险。机器人防护套为一次性产品,可用于UR3e、UR5e和UR10e。
防护套采用简单的套穿式设计,适用于所有1轴到6轴机器人,不影响机器人关节的运动。
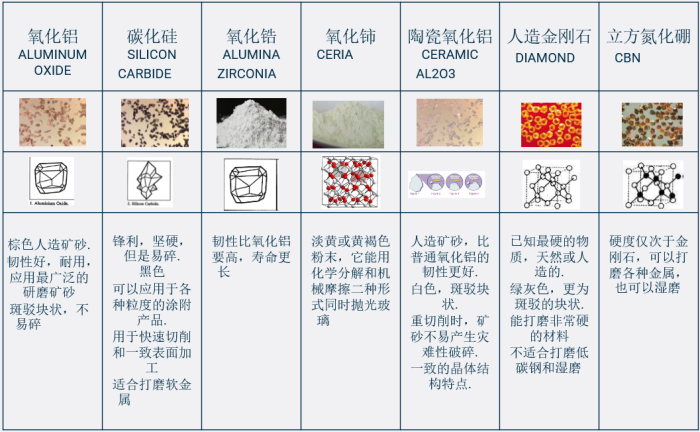
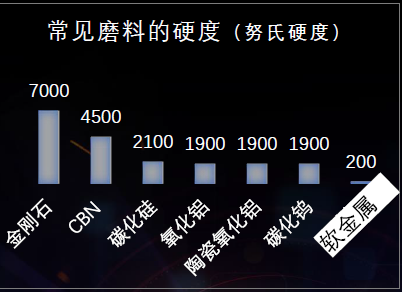
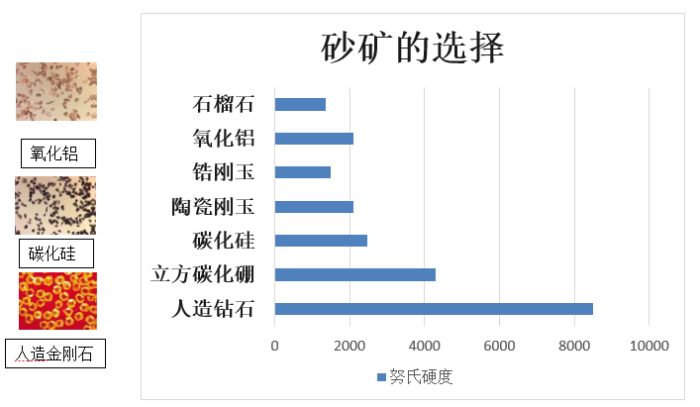
7.磨料选择
磨削的本质是两种材料的相互摩擦。参与摩擦的材料会根据自身的硬度、韧性产生磨损。通常情况下,磨料的硬度要大于被加工材料的硬度两倍。
矿砂种类
磨具种类

耗材种类

砂矿的种类
以上是对打磨工艺以及打磨机器人工作原理的基本介绍。下一篇,我们将为您推荐可以和优傲机器人无缝对接即插即用的UR+末端打磨工具,如Robotiq的精加工套件,Mirka®AIROS智能磨机,ATI浮动去毛刺刮刀片等,以及打磨机器人在汽车、电子、生活用品等领域的应用案例。敬请期待!



文章来源:优傲机器人
图片来源:优傲机器人
转载平台:微信公众号
责任编辑:朱晓裔
审 核 人:李峥
热点文章
-

长征十号乙一子级回收圆满成功!火箭量产制造装备迎来确定性产业红利
2026-07-10
-

订单多点开花!拓璞成套装备全面赋能,开启大直径火箭批量生产新时代
2026-07-13
-

【雷尼绍】工业之眼(一) | 精准位置反馈为什么是运动控制的基石?
2026-07-15
-

-

IMAO今尾【产品介绍】机器人用夹具:可运用于自动化设备的机械式夹具
2026-07-13
-

聚力共赢・深耕智造 | 易格斯与大前机床签署战略合作协议,五年携手从产品配套迈向价值共创
2026-07-15
-

精雕科技与见真机械签署战略合作协议
2026-07-16








评论
加载更多