API机器人解决方案RMS-上篇 (3)
RPM模块
(Robot Performance Measurement)
4. 静态性能规范的测量。
-位姿准确度和位姿重复性
-多方向位姿准确度变动
-距离准确度和距离重复性
-位姿特性漂移
-互换性
-静态柔顺性
API RMS同时支持多靶球测量方案和6维智能靶标。其中的多靶球六维测量方案可以提供最大的经济性。6维智能靶标则提供高效率和便捷性。
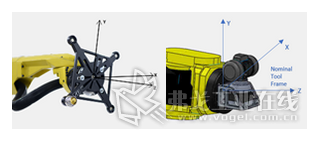
使用多靶球时,其中一个靶球被设定为工具中心点,可以进行所有动态性能试验,并提供位置信息,另外两个靶球用于计算机器人末端姿态角信息,如果使用6维自动靶标则可以在一次测量中得到所有的位姿信息。API RMS通过检测机器人运动停止状态,触发记录数据,自动完成所有形态试验项目,一旦开始试验就不再需要人为干预,可以自动完成后续测量。对于一些生产线上的自动化测量需求,用户可以定制可选的机器人通讯接口,通过IO信号来控制机器人和测量系统之间的同步协调,实现全自动测量。
a). 多方向位姿准确度变动。
多方向位姿准确度变动要求机器人在每个试验位置都以x,y,z三个方向进入,测量机器人实到位姿的变动(不是和指令位置进行比较),需要注意的是机器人的运动路径仍然不能超过立方体的范围,因此,如果所有测量点都应该从立方体的中心由内而外进入试验位置。
b). 位姿特性漂移
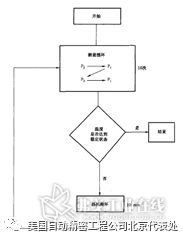
位姿特性漂移只选用一个试验位置(通常是立方体中心点P1),长时间观测机器人到该位置的位姿变化,标准建议的试验间隔周期为10分钟,每次记录重复10个循环。在10分钟间隔时间内,务必保持机器人处于热机状态,为了操作方便,一般编程控制机器人从P2点向P1点运动70%行程然后返回P2,并不到达P1点,以免误采数据。由于一些机器人控制器不支持较长时间的定时器指令,API RMS中10分钟间隔由测量系统电脑控制计时,当时间满足10分钟,并且机器人也回到P1点时,软件才会开始新一轮记录(10个循环)。
c). 互换性
互换性是指机器人在发生故障需要更换的情况下,新的机器人安装在同一机械接口上,在不重新进行工作场景标定的情况下,所能达到的位置准确度的一致性。它主要反映多个机器人基于其机械安装接口的位姿准确度的一致性。包括机器人基座,以及工具接口的机械重复定位性能。需要注意更换机器人以后,需要将装有靶球或测量靶标的工具,整体原封不动安装在新机器人的末端接口上,并用定位销保证对中且安装方向一致。
d). 静态柔顺性
静态柔顺性试验需要设计专门的加载装置,对机器人末端施加指定的负载,通常可以利用滑轮机构和砝码来控制力的大小和方向。进行这一试验时,必须用指令控制机器人到达试验位置,伺服处于打开状态,所有关节不得掉电抱闸。
以上结合API RMS 系统中的RPM模块介绍了ISO9283试验中大家关心的一些问题,我们在下一期中会结合API RMS系统中的DH模块介绍关于机器人DH参数校准和补偿应用的知识。
热点文章
-

订单多点开花!拓璞成套装备全面赋能,开启大直径火箭批量生产新时代
2026-07-13
-

聚力共赢・深耕智造 | 易格斯与大前机床签署战略合作协议,五年携手从产品配套迈向价值共创
2026-07-15
-

【雷尼绍】工业之眼(一) | 精准位置反馈为什么是运动控制的基石?
2026-07-15
-

精雕科技与见真机械签署战略合作协议
2026-07-16
-

-

IMAO今尾【产品介绍】机器人用夹具:可运用于自动化设备的机械式夹具
2026-07-13
-

【总部新闻】绿色责任,智造未来——魏因加特纳获气候联盟认证
2026-07-17








评论
加载更多