徕卡GeoMoS自动化监测方案在西安地铁的应用案例
项目背景
在已经运营的地铁隧道保护区上方进行新建工程施工(如基坑)的情况在所难免,一旦处理不好就可能造成地铁隧道的各种危害,如管片开裂、渗漏或局部破坏等情况,严重时甚至可能造成地铁轨道的扭曲变形,影响地铁隧道的结构安全与地铁列车的安全运行。本次地铁监测项目位于西安地铁一号线,监测目的是为了保障保护区内地铁的安全运行,分析地铁隧道整体变形的变化趋势,在隧道变形超过一定限度的阈值时,给出必要的预警并及早采取相应的补救措施。

项目特点
时间:2021年
1、 客户需求:
②监测点的监测精度,100米的距离要求达到±1mm;
③能够进行稳定的4G通讯,并兼容其他的通讯模式;
④系统软件中心化,能够对不同城市的不同项目分别进行远程管理。
2、 分析需求
目前地铁自动化监测方案有内观和外观两大类。内观主要是应力和应变监测。外观主要是隧道里特征点的3D位移,直接展示隧道管片的变形。徕卡地铁自动化监测系统是目前国内广泛应用的地铁外观自动化监测方案,徕卡TM60因为其独特的产品性能特点,是一款地铁外观自动化监测中表现极佳的监测型机器人。
监测方案
1、方案设计
(1)徕卡TM60:

徕卡TM60机器人全自动采集控制点和监测点的数据,首先以控制点坐标为基准,进行控制测量,利用徕卡组网平差软件,计算出机器人设站点、背靠背点、传递点的三维坐标值,再以此为基准来获取每个监测点的空间三维坐标。
(3)初始值的获取:
在进行自动化监测之前,必须首先获取点的初始值和参考值,机器人在经过一段时间观测后,选择前面几期较为稳定的点的数据,再取平均值,作为各个点的初始值。后续的自动化监测以该初始值作为基准,进行差异化变形分析。作为基准的控制点,定期与附近的高级控制点进行联测,即使控制点发生位移,也能把控制点的位移考虑进去,从而减小误差。
(4)优秀的小视场:
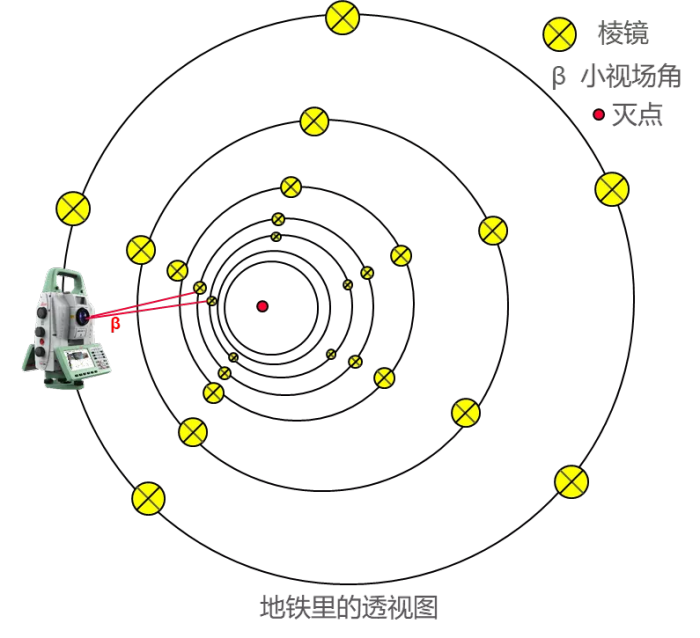
2、方案内容
(1)棱镜&点位:
本方案由4台徕卡TM60机器人自动化全站仪和若干个监测棱镜组成,监测棱镜采用L型小棱镜,在变形区域的50个断面上,共计300个,基准棱镜采用标准圆棱镜,共计16个,布设在监测范围外,稳定的区域。

(2)通讯&软件:
徕卡GeoMoS地铁自动化监测数据、自动传输和自动处理,是地铁现代化监测系统的最大优势,徕卡TM60机器人在采集完监测数据后,通过4G传输的方式,将数据传输回徕卡GeoMoS系统。系统实现对徕卡TM60机器人的控制、采集、存储、计算和数据分析等工作。
整个监测过程无任何人工干预,数据采集确保真实可靠,结果准确可信。
项目小结
热点文章
-

长征十号乙一子级回收圆满成功!火箭量产制造装备迎来确定性产业红利
2026-07-10
-

订单多点开花!拓璞成套装备全面赋能,开启大直径火箭批量生产新时代
2026-07-13
-

【雷尼绍】工业之眼(一) | 精准位置反馈为什么是运动控制的基石?
2026-07-15
-

-

IMAO今尾【产品介绍】机器人用夹具:可运用于自动化设备的机械式夹具
2026-07-13
-

聚力共赢・深耕智造 | 易格斯与大前机床签署战略合作协议,五年携手从产品配套迈向价值共创
2026-07-15
-

精雕科技与见真机械签署战略合作协议
2026-07-16








评论
加载更多