API机器人解决方案RMS-下篇连载(5)
DH参数校准模块
(Denavit-HartenbergModeling&Calibration)
(上接)
三、在API RMS系统中对DH参数进行标定
a). DH参数标定求解的补偿参数(变量)配置问题;
选定需要补偿的变量进行优化求解计算,系统对所有标定姿态的偏差的均方和进行优化,需要根据机器人控制器中的连杆参数定义来确定需要优化计算的变量。
根据基坐标系的确定方式(直接求解或预先测量),J1的DH参数可以选择为求解或者固定为理论值,如果求解,通常只选取J1关节零位θ和J1高度D。
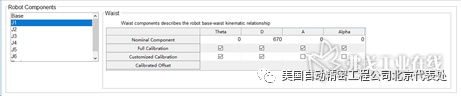
在常见的6轴机器人DH模型中,J2和J3往往是平行关系,在忽略J2和J3之间α和β角误差(实际上近似为零)的前提下,J2和J3的参数D具有等效性,也就是说,不管机器人处于何种位姿下,都可以通过改变其中的任意一个,对末端执行器位置造成相同的影响。这会导致优化计算过程中两个变量互相牵制,出现互为相反数的无效优化方向,从而降低计算效率。对于这样的变量我们可以只选取其中的一个变量J3的D参数作为优化对象。
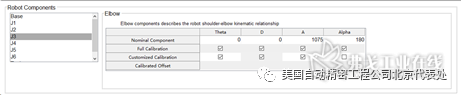
J5的A和D,以及J6的A通常为零,理论轴线和J4轴线相交一点,如果想要输入控制器进行优化,需要注意结果的正负号,因为DH模型的表达式是不唯一的,即使实际等效的DH模型,AD参数也可能存在符号定义相反的情况,对于理论值为零的连杆参数,尤其要小心对待。
J6的D参数,实际代表手腕中心点(J5-J6交点)到末端法兰面的距离,如果不关心这一距离的误差,或者不能预先测量出靶标相对于工具坐标系(法兰端面加周向定位销孔确定)的坐标值,则将J6的D排除在优化变量之外,因为J6D和工具中心偏移的Z方向也存在等效性,会降低计算效率。
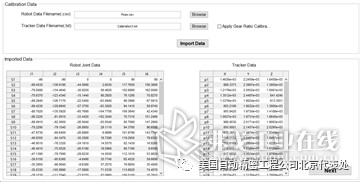
b) 测量数据的获取;
API RMS提供减速比校准测量和DH参数校正测量的功能,通过稳定点触发采样,推荐使用主动靶标来保证测量过程的连续跟踪,如果测量过程出现断光,当靶标返回到可接受光线的角度,系统可以使用iVision(对于Radian机型)或AutoLock(对于OT2系列机型)自动捕获靶标,继续进行测量,整个测量过程可以不需要认为干预,也不必要与机器人建立硬件通讯接口,这大大方便了那些提供标定服务的第三方公司,因为他们需要面对大量客户和机型,不能一一配套连接机器人控制器的硬件通讯系统。API RMS系统中提供了专门的测量方法来标定减速比误差。

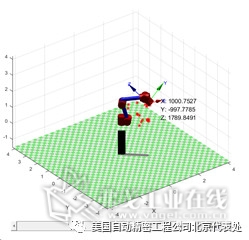
在API RMS系统中,还可以用模拟器对DH参数校准位姿进行模拟,核对验证每个校准位姿的正确性。测量完成后,将关节角数据和对应的测量数据导入计算。API RMS最少需要30个校准位姿进行DH参数校准。
热点文章
-

【雷尼绍】Equator™ 比对仪—产线里的“测量机器人”来了!
2026-07-17
-

热度拉满|WAIC 现场人气爆棚,TOPFAB 桌面 AI 五轴机床引爆全场关注
2026-07-20
-

【总部新闻】绿色责任,智造未来——魏因加特纳获气候联盟认证
2026-07-17
-

IMAO今尾【产品介绍】气动旋转式夹具:无需工具的夹具气动型
2026-07-20
-

以智造装备育新质人才 | 拓璞亮相服务型制造研修班,全维度布局产教融合新赛道
2026-07-24
-

IMAO今尾【产品介绍】楔型锁紧器(收销式)、代替螺栓的缔结部件 "快速锁紧"
2026-07-20
-

幅面升级 | 百超强劲性能激光切割机:ByCut Smart
2026-07-23








评论
加载更多