高空作业车工作斗运动振幅的动态检测评估 · API Radian激光跟踪仪 & ActiveTarget活动靶标

图1:某型号高空作业车
关于高空作业车
高空作业车,也称移动式高空作业平台。是可运送工作人员和使用器材到现场并进行空中作业的专用车辆,广泛应用于市政、园林、电力、石油、建筑等各高空作业领域。其基本结构由车、回转机构、举升机构、和工作斗(也称工作平台或吊篮,以下统称“工作斗”)组成。伴随着高空作业车制造技术的不断发展,有效举升高度也在不断的提升,通常来讲,高空作业车的举升高度从几米到几十米不等。

图2:工作斗处于举升状态
检测需求
由于高空作业车的举升高度在不断提升,固定在举升机构末端的工作斗的平稳性需要得到严格的保障。因为工作斗是承载高空作业人员的平台机构,它的稳定与否,会对高空作业人员的人身安全及心理状态产生极大影响。
为了监测某新型号高空作业车工作斗在移动过程中的实时震动幅度,并对数值加以评估、分析,位于中国的、世界最大的高空作业车生产基地之一,向API公司寻求解决方案。
负责该新型号空中作业车的设计经理希望对工作斗在举升、下降、摆转等工作过程中的震动幅度进行实时监测,并得到数据,用于该型号高空作业车性能的改进分析。

图3:检测进行中
检测设备及方案
本次检测计划使用API品牌的Radian Plus型号激光跟踪仪配以ActiveTarget主动靶标进行。计划将ActiveTarget主动靶标固定在工作斗的下方,在工作斗运动的过程中,使用Radian Plus激光跟踪仪实时跟踪检测ActiveTarget主动靶标的动态位移坐标,并记录数据,从而体现出工作斗在运动过程中的振动幅值。
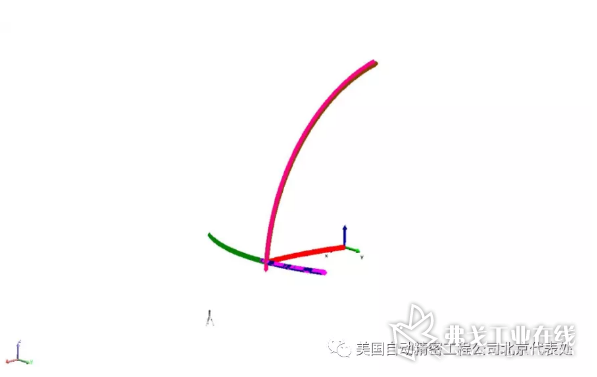
图4:建立坐标系
检测实施
1. 架设Radian Plus激光跟踪仪并将ActiveTarget主动靶标固定在工作斗下方。
2. 建立坐标系,以举升机构缩到最短的时候为原点、大地水平方向为Z方向、举升的方向为X方向、摆转方向为Y方向(请见图4)。
3. 通过Radian Plus激光跟踪仪实时跟踪固定在工作斗下方的ActiveTarget主动靶标,并记录下运动过程中的各个点的实时坐标,从而计算出工作斗在各运动测试中的振动幅值。以举升机构从最短升至最长的运动过程为例,请参见图5、图6、图7,见工作斗在X、Y、Z三个方向上的振动幅值。
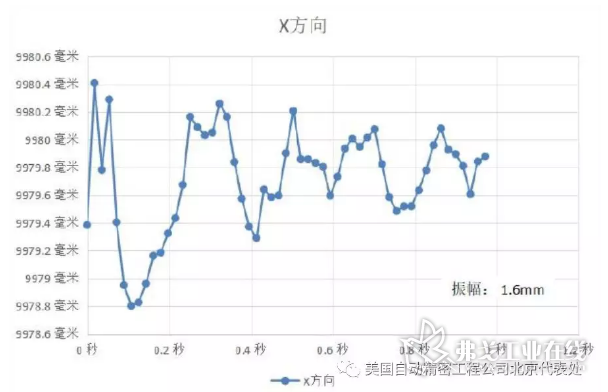
图5:举升机构从最短升至最长X方向振幅
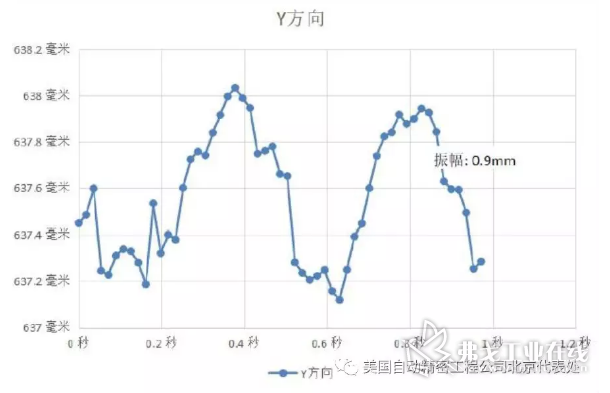
图6:举升机构从最短升至最长Y方向振幅
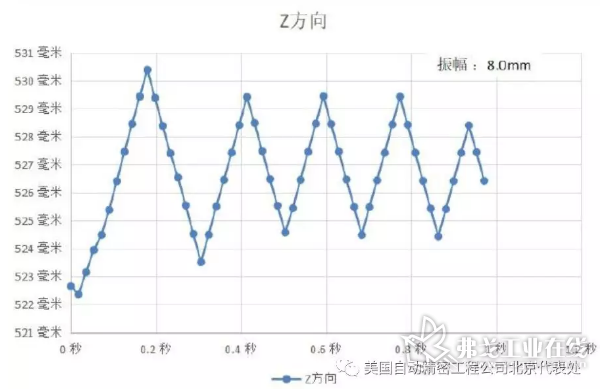
图7:举升机构从最短升至最长Z方向振幅
检测评估与结论
Radian Plus激光跟踪仪配合ActiveTarget主动靶标完美的实现了检测方案、满足了客户的检测需求,达到了预期效果。
由于Radian Plus激光跟踪仪是高集成一体化机身设计,集控制箱、电池供电系统、无线数据传输系统于一身,可实现真正的完全无线测量,故而即便是在空旷的场地上也可轻松完成测量作业。另外,其满足IP防水防尘等级的制造工艺,也大大的保障了其在野外进行测量作业的防尘、防潮的需求。
高空作业车设计负责人在得到测量结果后评价到:使用API激光跟踪仪检测工作斗的振幅效率极高,只需要工作斗在其运动空间内移动一遍,10分钟,就可以将动态数据实时的反馈出来,而这些反馈出来的数据,对我们是十分有意义的,它对我们产品质量和安全性能的提升,都有着极高的参考价值。
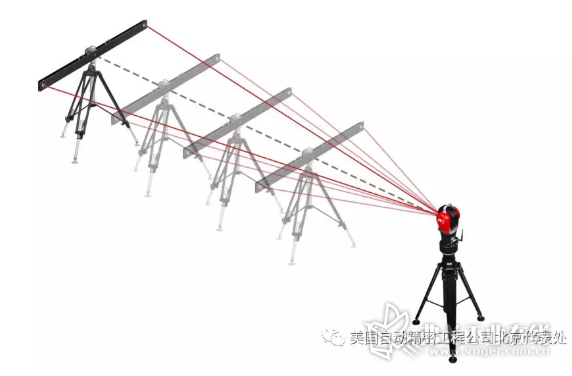
图8:Radian激光跟踪仪
热点文章
-

聚力共赢・深耕智造 | 易格斯与大前机床签署战略合作协议,五年携手从产品配套迈向价值共创
2026-07-15
-

精雕科技与见真机械签署战略合作协议
2026-07-16
-

【雷尼绍】Equator™ 比对仪—产线里的“测量机器人”来了!
2026-07-17
-

【雷尼绍】工业之眼(一) | 精准位置反馈为什么是运动控制的基石?
2026-07-15
-

【总部新闻】绿色责任,智造未来——魏因加特纳获气候联盟认证
2026-07-17
-

热度拉满|WAIC 现场人气爆棚,TOPFAB 桌面 AI 五轴机床引爆全场关注
2026-07-20
-









评论
加载更多